Review — Π-Model, Temporal Ensembling: Temporal Ensembling for Semi-Supervised Learning
Stochastic Augmentation, Network Dropout, & Momentum Encoder are Used
5 min readApr 14, 2022

Temporal Ensembling for Semi-Supervised Learning
Π-Model, Temporal Ensembling, by NVIDIA
2017 ICLR, Over 1400 Citations (Sik-Ho Tsang @ Medium)
Semi-Supervised Learning, Image Classification
- Predictions are under different regularization and input augmentation conditions.
- Self-ensembling is used, which is similar to momentum encoder in MoCo.
Outline
- Π-Model
- Temporal Ensembling
- Experimental Results
1. Π-Model
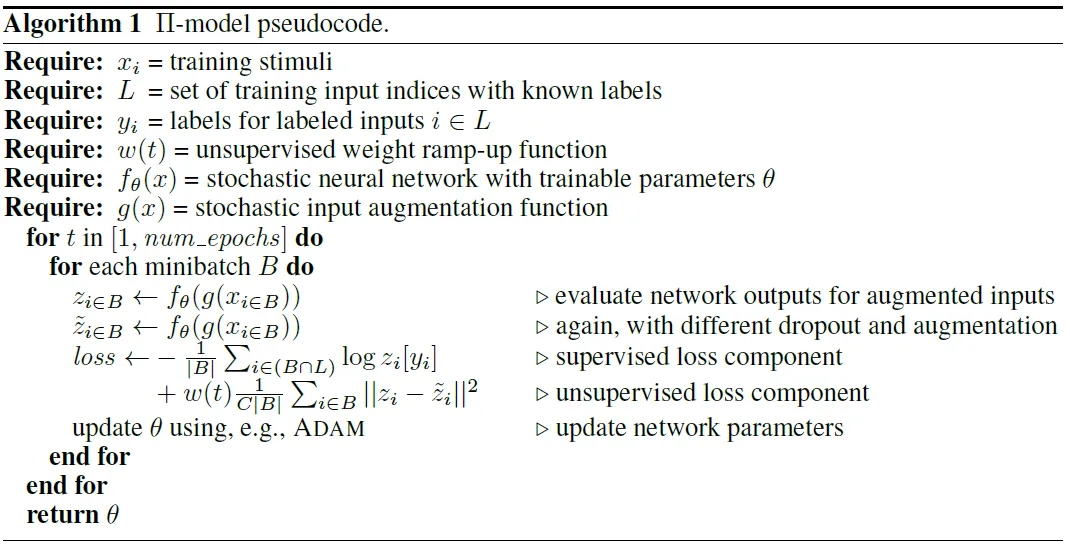

- During training, the network evaluates each training input xi twice, resulting in prediction vectors zi and ~zi.
- Loss function consists of two components:
- The first component is the standard cross-entropy loss, evaluated for labeled inputs only.
- The second component, evaluated for all inputs, penalizes different predictions for the same training input xi by taking the mean square difference between the prediction vectors zi and ~zi.
- Because of Dropout regularization, as well as Gaussian noise and augmentations, there is difference between the prediction vectors zi and ~zi given the same original input xi. However, the labels should be the same since they are coming from the same original input xi. Thus, minimizing the MSE between zi and ~zi is reasonable.
- To combine the supervised and unsupervised loss terms, a time-dependent weighting function w(t) is used to scale/balance the two terms, where t is the epoch number. This w(t) ramps up, starting from zero, along a Gaussian curve during the first 80 training epochs.
- Compared to Γ-Model, instead of having one “clean” and one “corrupted” branch as in Γ-Model, augmentation and noise are applied to the inputs for both branches.
- (The two-branch architecture for zi and ~zi is commonly used in later self-supervised learning.)
2. Temporal Ensembling


- The main difference to the Π-model is that the network and augmentations are evaluated only once per input per epoch.
- And the target vectors ~z for the unsupervised loss component are based on prior network evaluations instead of a second evaluation of the network:

- where α is a momentum term.
- Because of Dropout regularization and stochastic augmentation, Z thus contains a weighted average of the outputs of an ensemble of networks f from previous training epochs, with recent epochs having larger weight than distant epochs.
- (This is the idea used by later self-supervised learning such as MoCo.)
- For generating the training targets ~z, the startup bias in Z needs to be corrected by dividing by factor (1-α^t). Since on the first training epoch, Z and ~z are zero as no data from previous epochs is available. For this reason, the unsupervised weight ramp-up function w(t) is also zero on the first training epoch.
- The benefits of temporal ensembling compared to Π-model are twofold:
- First, the training is faster because the network is evaluated only once per input on each epoch.
- Second, the training targets ~z can be expected to be less noisy than with Π-model.
3. Experimental Results
3.1. Network Architecture

- A network architecture similar to VGGNet is used.
3.2. CIFAR-10

- Π-model obtains 16.55% error rate on CIFAR-10.
- Enabling the standard set of augmentations further reduces the error rate by 4.2 percentage points to 12.36%.
- Temporal ensembling is slightly better still at 12.16%, while being twice as fast to train.
3.3. SVHN

- With the most commonly used 1000 labels, an improvement of 2.7 percentage points is observed, from 8.11% (Sajjadi NIPS’16) to 5.43% without augmentation, and further to 4.42% with standard augmentations.
- When augmentations were enabled, temporal ensembling further reduced the error rate to 5.12%. In this test the difference between Π-model and temporal ensembling was quite significant at 1.5 percentage points.
3.4. CIFAR-100

- With 10000 labeled images, Π-model obtains error rates of 43.43% and 38.65% without and with augmentation, respectively. These correspond to 7.8 and 5.9 percentage point improvements compared to supervised learning with labeled inputs only.
3.5. CIFAR-100 + Tiny Images

- Unlabeled extra data from Tiny Images dataset, is used. One with randomly selected 500k extra images, most not corresponding to any of the CIFAR-100 categories, and another with a restricted set of 237k images from the categories that correspond to those found in the CIFAR-100 dataset.
- Unlabeled extra images improved the error rate by 2.7 percentage points (from 26.30% to 23.63%).
- However, restricting the extra data to categories that are present in CIFAR-100 did not improve the classification accuracy further.
Reference
[2017 ICLR] [Π-Model, Temporal Ensembling]
Temporal Ensembling for Semi-Supervised Learning
Pretraining or Weakly/Semi-Supervised Learning
2013 [Pseudo-Label (PL)] 2015 [Ladder Network, Γ-Model] 2016 [Sajjadi NIPS’16] 2017 [Mean Teacher] [PATE & PATE-G] [Π-Model, Temporal Ensembling] 2018 [WSL] 2019 [Billion-Scale] [Label Propagation] [Rethinking ImageNet Pre-training] 2020 [BiT] [Noisy Student] [SimCLRv2]
